
Seoses kasvava nõudlusega teede ja sildade koormuse jälgimise järele tänapäevases liikluskorralduses on Weigh-In-Motion (WIM) tehnoloogia muutunud liikluskorralduse ja infrastruktuuri kaitsmise oluliseks vahendiks. Enviko suurepärase jõudluse ja töökindlusega kvartssensortooteid on laialdaselt kasutatud WIM-süsteemides.
Kvartsi liikumises kaalumise (WIM) algoritmide põhimõtted
Kvartsist Weigh-In-Motion (WIM) süsteemi tuumaks on mõõta sõidukite poolt teepinnale avaldatavat rõhku reaalajas, kasutades teele paigaldatud kvartsandureid. Kvartsandurid kasutavad rõhusignaalide elektrilisteks signaalideks teisendamiseks piesoelektrilist efekti. Neid elektrilisi signaale võimendatakse, filtreeritakse ja digiteeritakse, mida kasutatakse lõpuks sõiduki massi arvutamiseks.
Enviko WIM-süsteemides kasutatavatel kvartsanduritel on kõrge tundlikkus ja lai sageduskarakteristikud, mis võimaldavad neil täpselt fikseerida hetkelised rõhumuutused, kui sõidukid neist üle sõidavad. Lisaks on kvartsanduritel suurepärane temperatuuristabiilsus ja pikk kasutusiga, säilitades stabiilse jõudluse erinevates karmides keskkondades.
Weigh-In-Motion (WIM) algoritmi sammud
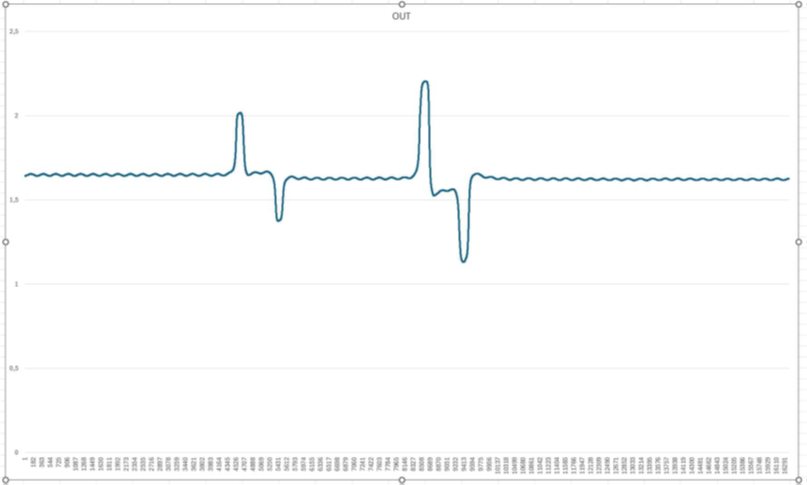
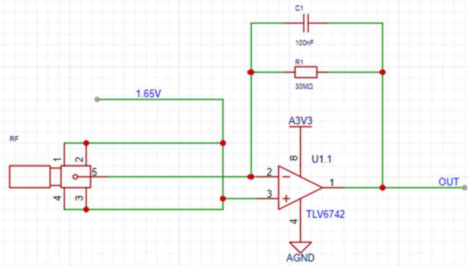
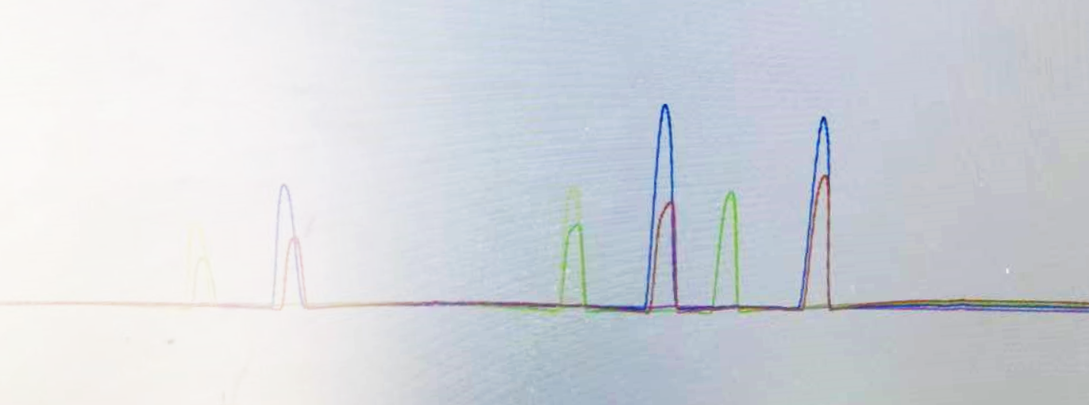
1.Signaali omandamine: püüdke kvartsandurite abil kinni mööduvate sõidukite avaldatavad rõhusignaalid, muutes need signaalid elektrilisteks signaalideks ja edastades need andmehõivesüsteemi.
2.Signaali võimendamine ja filtreerimine: võimendage ja filtreerige saadud elektrilisi signaale, et eemaldada müra ja häired, säilitades kasuliku kaaluteabe.
3.Andmete digitaliseerimine: teisendage analoogsignaalid digitaalsignaalideks, et neid hiljem töödelda ja analüüsida.
4.Algtaseme parandus: viige läbi signaalide algtaseme korrektsioon, et eemaldada nullkoormuse nihe, tagades mõõtmise täpsuse.
5.Integratsiooni töötlemine: integreerige aja jooksul korrigeeritud signaalid, et arvutada kogulaeng, mis on proportsionaalne sõiduki massiga.
6.Kalibreerimine: Kasutage eelnevalt kindlaksmääratud kalibreerimiskoefitsiente, et teisendada kogulaeng tegelikeks kaaluväärtusteks.
7.Kaalu arvutamine: Kui kasutatakse mitut andurit, summeerige sõiduki kogumassi saamiseks iga anduri kaalud.
Algoritmide ja täpsuse vaheline seos
Weigh-In-Motion (WIM) süsteemi täpsus sõltub suuresti kasutatavatest algoritmidest. Enviko kvartsandurid tagavad kaalu mõõtmise täpsuse läbi ülitäpse signaali kogumise ja töötlemise. Andmetöötlusalgoritmide täpsus ja tõhusus mõjutavad otseselt lõplikke kaalumistulemusi. Täiustatud signaalitöötluse ja andmeanalüüsi algoritmid võivad tõhusalt parandada kaalumise täpsust ja vähendada mõõtmisvigu.
Täpsemalt on kaalumise täpsust mõjutavad peamised tegurid signaali omandamise täpsus, müra filtreerimise tõhusus ning integreerimis- ja kalibreerimisprotsesside täpsus. Enviko kvartsandurid on nendes valdkondades suurepärased, tagades täiustatud algoritmide ja kvaliteetse riistvara abil WIM-süsteemide suure täpsuse ja töökindluse.
Paigaldamise ja täpsuse vaheline seos

Kvartsandurite paigaldusasend ja -meetod mõjutavad oluliselt WIM-süsteemi mõõtmistäpsust. Andurid tuleks paigaldada sõiduki võtmepositsioonidele, et tagada maksimaalsete rõhumuutuste täpne fikseerimine. Paigaldamise ajal on hädavajalik tagada andurite ja teekatte tihe kontakt, et vältida ebaõigest paigaldusest tulenevaid mõõtmisvigu.
Lisaks võivad anduri jõudlust ja mõõtmise täpsust mõjutada ka keskkonnategurid, nagu temperatuur, niiskus ja maapinna tasane. Kuigi Enviko kvartsanduritel on suurepärane temperatuuristabiilsus, on äärmuslike temperatuuritingimuste korral siiski vaja vastavaid kompensatsioonimeetmeid, et tagada täpsed mõõtmistulemused.
Andurite pikaajalise stabiilse töö tagamiseks on oluline ka regulaarne kalibreerimine ja hooldus. Professionaalse paigalduse ja hoolduse abil saab Enviko kvartsandurite jõudlust maksimeerida, pakkudes täpseid ja usaldusväärseid dünaamilise kaalumise (WIM) andmeid.
Järeldus
Enviko kvartsandurite rakendamine dünaamilistes kaalumissüsteemides (WIM) pakub tõhusaid ja töökindlaid lahendusi liikluskorralduseks ja infrastruktuuri kaitseks. Täpse signaali omandamise, täiustatud algoritmitöötluse ning professionaalse paigalduse ja hoolduse abil suudavad dünaamilise kvartskaalu (WIM) süsteemid saavutada sõiduki massi reaalajas jälgimise ja haldamise, vähendades tõhusalt teede ja sildade kulumist ning parandades liikluskorralduse tõhusust. Tänu pidevatele tehnoloogilistele edusammudele hakkavad Enviko kvartsandurid WIM-süsteemides mängima üha olulisemat rolli, luues tugeva aluse intelligentse transpordi arendamiseks.

Enviko Technology Co., Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Chengdu kontor: nr 2004, üksus 1, hoone 2, nr 158, Tianfu 4th Street, kõrgtehnoloogia tsoon, Chengdu
Hongkongi kontor: 8F, Cheung Wang Building, San Wui tänav 251, Hongkong
Postitusaeg: august 07-2024




