
Sissejuhatus
Veokite ebaseaduslik üle- ja ülekoormamine ei lõhu mitte ainult maanteed ja sillarajatisi, vaid põhjustab kergesti ka liiklusõnnetusi ning seab ohtu inimeste elu- ja vara ohutuse. Statistika järgi on üle 80% veokite põhjustatud liiklusõnnetustest seotud ülegabariidiliste ja ülekoormatud transpordiga.
Traditsioonilise ülejooksmise ja ülekoormatud transpordi kontrollpunkti režiimil on madal õiguskaitsetõhusus, mis põhjustab kergesti sõidukite väljajätmise nähtust, ja otsese jõustamise tuvastamise punktide juhtimisrežiim tugineb dünaamilisele automaatsele kaalumis- ja tuvastussüsteemile, mis tuvastab, tuvastab ja sõelub automaatselt ööpäevaringselt mööduvad sõidukid, et saavutada ülejooksnud ja ülekoormatud sõidukite täpne ja tõhus kontroll. Ülekoormatud transpordikäitumise juhtimise tugevdamiseks, maanteerajatiste ning inimeste elude ja vara ohutuse tagamiseks on maanteel järk-järgult täiel määral edendatud ja rakendatud teeületamise otsest jõustamissüsteemi ning maanteede ületamise kontroll on saavutanud märkimisväärseid tulemusi ning maanteede ületamise määra kontrollimine on kontrollitud 0,5% piires ning tavaliste maanteede ebaseaduslik ületamine ja ülekoormus on olnud ka tõhus.
Otsese jõustamissüsteemi raamistik
1. Juhtimissüsteemi raamistik ja funktsioonid
Otsene jõustamisviis viitab asjakohaste andmete (nt mööduvate sõidukite massi) automaatsele hankimisele kiire ja täpse dünaamilise kaalumise seadmete kaudu, et teha kindlaks, kas kaubaveokid on ülekoormatud ja transporditud, ning tugineda teaduslikele ja tehnoloogilistele vahenditele tõendite hankimiseks ning nendest hiljem teavitamiseks ja nendega tegelemiseks.
Riiklikku võrguhalduse infosüsteemi korraldab ja ehitab Teedeministeerium ning provintside süsteemiandmeid ühendab ja jagab, pakkudes tuge ministeeriumide- ja provintsidevaheliseks ettevõtluse koordineerimiseks ning tõhusalt teostades järelevalvet riigi valitsemise ja ülevalitsemise töö üle; Provintsi tasandi projekti korraldab ja koostab provintsi (autonoomse piirkonna, munitsipaalpiirkonna) transpordiosakond, et realiseerida jurisdiktsioonis ärijuhtimise ja teeninduse ülesandeid, toetada provintsi, munitsipaal- ja maakonnatasandit inspekteerimistööde läbiviimisel ning ühendada ministeeriumi tasandi süsteemiga.
Võttes näiteks Zhejiangi, võtab provintsi võrgustatud juhtimissüsteem neljakihilise struktuuri ja kolmetasandilise juhtimise ülalt alla, mis on järgmised:
1) Provintsi valitsemise platvorm
See täidab kuue peamise platvormi rolli provintsi võrgustatud juhtimissüsteemis, nimelt: põhiandmekeskuse platvorm, andmevahetusplatvorm, halduskaristuse platvorm, ühekordne ebaseaduslik abikohtuotsuse platvorm, hindamis- ja hindamisplatvorm ning statistilise analüüsi ja kuvamisplatvorm. Ühendage provintsi valitsuse teenindusvõrguga, et hankida asjade andmebaas, suvaline andmebaas ja õiguskaitsetöötajate andmebaas ning teatada reaalajas halduskaristuse käsitlemise teave; Dokkimine liikluspolitsei süsteemiga, et hankida teavet kaubaveosõidukite ja juhi kohta, kopeerida ebaseaduslikku ülesõiduteavet; Dokkimine veohaldussüsteemiga, et saada teavet transpordiettevõtete, kaubaveosõidukite jms kohta ning kopeerida ebaseaduslikku ülesõiduteavet; Haldusjaama ühtne dokumendimall ja põhiteave ning musta nimekirja/litsentside haldamine; Võtta ellu abimäärus üks trahv ühe suuremagabariidilise veo reisi eest; hinnata ja hinnata provintsi seirejaamade tööd ja superkontrolliäri toimimist; Statistika ja andmete analüüsi kaudu hinnatakse provintsi valitsemis- ja supervalitsemispoliitikat ning poliitika juurutamist toetatakse kvantitatiivselt; Pakkuda asjakohast õiguslikku ja regulatiivset tuge valitsemistöö jaoks kõigil tasanditel ning luua äriandmebaas provintsi, omavalitsuse ja maakonna tasandil.
2) Prefektuuri tasandi valitsemise supermoodul
Vastutab põhilise äriteabe igakülgse haldamise eest jurisdiktsioonis, ületatud teabe statistilise analüüsi, kohaliku linna õiguskaitseinspektsiooni, juhtumi haldusliku läbivaatamise, ettevõtte kasutuselevõtu, kohaliku linna kontrolli ja hindamise eest.
3) Linnaosa ja maavalitsuse supermoodul
Saate vastu võtta ja salvestada erinevate jurisdiktsioonis asuvate ületamise tuvastamise saitide ja rajatiste andmeid (sealhulgas kõikvõimalikud ületamise tuvastamise andmed, pildid ja videod). Koguda/üle vaadata/kinnitada piirkonna ebaseaduslikud ületamise andmed, failide arhiveerimine ning asjakohane statistika, analüüs ja kuvamine ringkonnas ja maakonnas.
4) Otsetäitmise kontrollipunktid
Teele üles seatud dünaamilise kaalumise ja püüdmise kohtuekspertiisi seadmete kaudu saadakse mööduva veoki kaal, numbrimärk ja muu asjakohane teave.
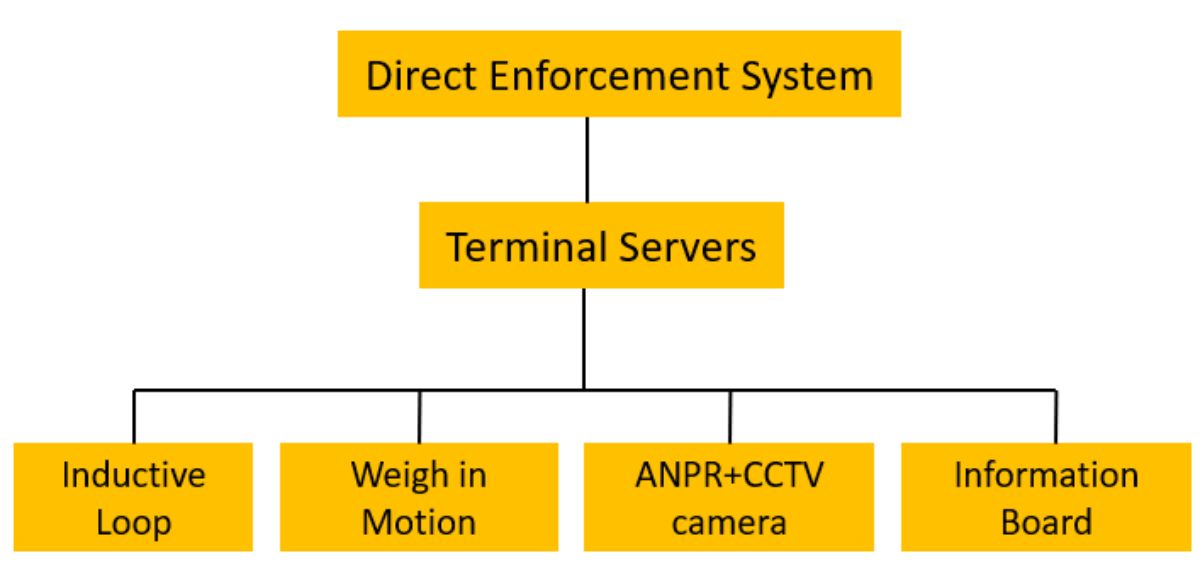
2. Otsese jõustamissüsteemi koosseis ja funktsioon
Otsese jõustamissüsteemi väliseadmed (vt joonis 1) hõlmavad peamiselt automaatseid kaalumis- ja tuvastamisseadmeid, sõidukite püüdmise ja tuvastamise seadmeid, ebaseaduslikust käitumisest teavitamise vahendeid, videovalveseadmeid jne.
1) Kaalumisseadmed: sealhulgas kaaluandurid, kaalumiskontrollerid (tööstusarvutid), autode turustajad jne peavad olema kontrollitud vastavate kvalifitseeritud mõõteasutuste poolt ning kaalumistulemusi saab kasutada karistuse määramise aluseks.
2) Kõrglahutusega tuvastus- ja salvestusseadmed: kasutatakse sõidukite kujutiste, sealhulgas numbrimärkide, kere seisundi, numbrimärkide ja värvide kogumiseks, mis võimaldavad sõidukeid tuvastada.
3) Videovalveseadmed: videovalveseadmete kasutamine veoautode kaalumise automaatse tuvastamise seadmete protsessi saamiseks ning videovalveseadmetega saadud seireteavet saab kasutada tõendina.
4) Teabe väljastamise seadmed: muutuva teabetahvli kaudu saab testitud ja ülesõitnud sõidukile reaalajas väljastada ülesõiduteate ning suunata veokijuhi mahalaadimiseks lähimasse mahalaadimiskohta.
Otsese jõustamise tuvastamise punktide kavandamine
Projekti koha valik
Ülekoormamise tõhususe suurendamiseks tuleks otsesed kontrollipunktid valida vastavalt "üldise planeerimise ja ühtse paigutuse" põhimõttele ning eelistada teid, millel on järgmised omadused:
1) veokid on tõsiselt üle sõitnud või veokid peavad teed läbima;
2) oluliste kaitstud sildadega ühendatud teed;
3) provintsi piirid, vallapiirid ja muude haldusalade ristmikuteed;
4) Maateed, millest on sõidukitel lihtne ümber pöörata.
2. Kaalumisseadme projekt
2.1. Dünaamilised veoautokaalud
Dünaamiline veokaal on automaatne kaal, mida kasutatakse pikisuunalise massi (kogumassi), teljekoormuse ja teljerühma koormuse mõõtmiseks sõiduki möödumisel ning sellel on peamiselt koormus.
Seade, andmetöötlusosa ja kuvariista koosnevad, kusjuures andmetöötlusosa on tavaliselt konstrueeritud juhtkapi kujul. Erinevate vedajate järgi saab dünaamilise veoki kaalud jagada sõidukitüübiks, teljekoormuse tüübiks, topeltplatvormi tüübiks, teljerühma tüübiks, mitme paigutusega kombinatsiooni tüübiks ja teljerühma tüübi kategooriaks võib pidada ka lameplaadi tüüpi. Kanduri tööpõhimõte on mõõta elektrilist signaali, kui kandur kannab rehvikoormust, ja seejärel teisendada see võimenduse ja signaalitöötluse abil sõiduki massiks, mille saab jagada kahte kategooriasse: tensomõõturi tüüp ja kvartskristalli tüüp.
Tuvastamistäpsuse nõuete täitmisel tuleks vastavalt teeoludele valida sobiv dünaamiline veoki skaala ning soodustada uue tehnoloogiaga suure täpsusega, madala hinnaga ja standarditele vastavate kaalumisseadmete kasutamist ning veokid, mida saab järjekorda panna ja läbida pideva kaalumise tuvastamise ala, saab täpselt eraldada.
2.2. Välisvarustuse kasutuselevõtt
Joonis 2 on tüüpiline otsetäitmisjaamade paigutusskeem ja tabelis 1 on toodud põhiseadmete funktsionaalsed nõuded. Kui otsese jõustamise tuvastamise punkt on seatud ühele kattega teele, tuleks kogu tee ristlõikele seada dünaamiline veoauto skaala ja kui kogu ristlõiget ei saa tingimuste tõttu seadistada, tuleks kaalumisest kõrvalehoidmise vältimiseks lisada isolatsioonivahendid, nagu valesti sõitmine ja sõitmine.
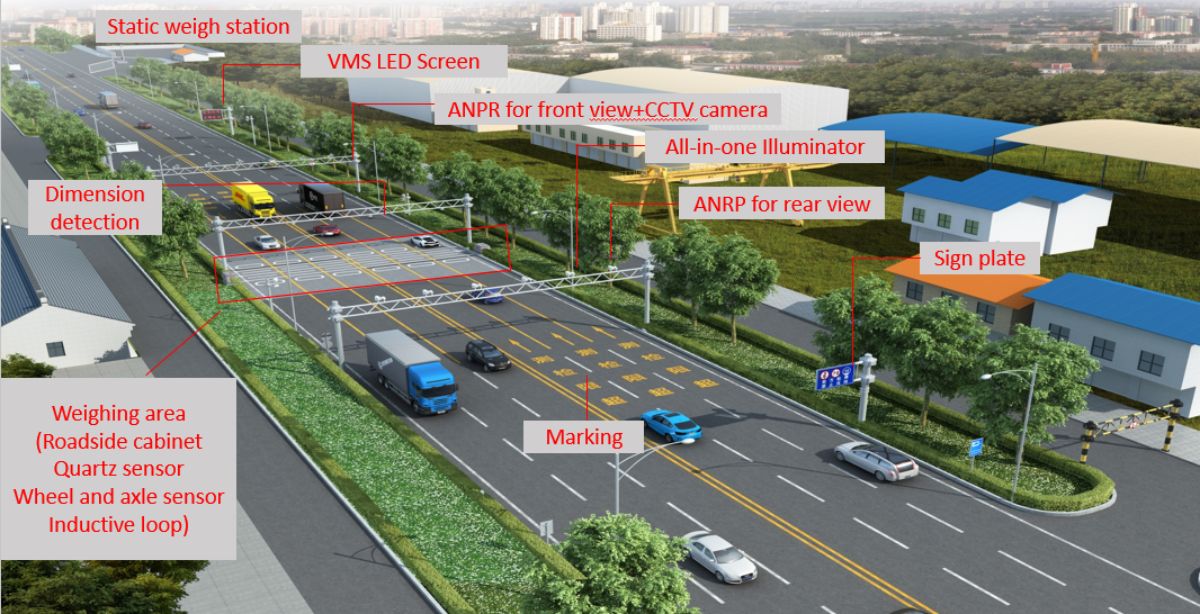
Joonis 2. Otsese jõustamisjaama tüüpiline diagramm
Tabel 1. Võtmeseadme funktsionaalsed nõuded
| Seadme nimi | Peamised funktsiooninõuded: | |
| 1 | Dünaamilised veoautokaalud | See suudab automaatselt tuvastada aega, telgede arvu, kiirust, ühe telje teljekoormust, sõiduki ja lasti kogumassi, teljevahet ja muud sõiduki teavet; See suudab kaubaveoki kaudu järjekorrarežiimi täpselt eraldada; See suudab toime tulla kaubaveokite ebatavalise sõiduseisundiga, nagu reavahetus ja kiiruse katkestamine; See suudab edastada reaalajas juhtimissüsteemi esiotsa veoki ületamise teabe; See suudab täita katkematut iga ilmaga pidevat tööd järelevalveta olekus; Sellel peaks olema vea enesetesti funktsioon |
| 2 | Numbrituvastus- ja pildistamisseadmed | peaks olema varustatud täitetule või vilkuriga; See suudab selgelt jäädvustada numbrimärgi numbri, sellel on keskkonnakaitse konfiguratsioon ja valgusreostuse vältimiseks on soovitatav kasutada kolm-ühes täitetuld; Võimalus jäädvustada kaubaveokite numbrimärkide pilte täiskaader JPG-vormingus; See peaks suutma jäädvustada 1 kõrglahutusega pilti esiosast ning pildiinfo järgi peaks selgelt eristama kaubaveoki numbrimärgi ala, esiosa ja kabiini tunnuseid ning auto esiosa värvi; Sõiduki identifitseerimis- ja püüdmisseadmed peaksid suutma jäädvustada pideva kaalumise tuvastusala läbiva sõiduki kujutist mitme nurga alt küljelt ja sabast ning selgelt eristama kaubaveoki telgede arvu, kere värvi ja veetava kauba põhiolukorda vastavalt pildiandmetele; Sõiduki identifitseerimis- ja püüdmisseadmetel peaks olema rikete enesekontrolli funktsioon; Ebatavaliste sündmuste püüdmise seade toetab sõiduki ebatavalise ristumise ja tihendusjoone tuvastamise funktsiooni. |
| 3 | Videovalve seadmed | Kohtuekspertiisi kujutised peavad olema vähemalt 2 miljoni piksliga ja võltsimiskindlad. |
| 4 | Teabe avaldamise seadmed | See peaks suutma väljastada sõiduki ülesõidu tuvastamise teavet reaalajas ülejooksnud sõiduki juhile ning see peaks olema võimeline realiseerima teksti vaheldumist, kerimist ja muid kuvamismeetodeid. |
Kui tuvastatakse sõiduki ülekoormamise kahtlus, kuvatakse muutuva infotahvli kaudu numbrimärk ja sõiduk suunatakse töötlemiseks lähedalasuvasse ülekoormatud transpordi kontrollpunkti. Infotahvli ja dünaamilise veoauto skaala seadistuskaugus peaks vastama sõiduki nägemise nõuetele ning vastavalt teeoludele on soovitatav valida sobiv muutuva infotahvli tüüp ja seadistuskaugus; Kui kaugus infotahvli ja dünaamilise veoki skaala vahel ei vasta teejoonistuse tingimuste tõttu juhi nähtavusnõuetele, on juhi nähtavuse aja parandamiseks soovitatav piirata veoki sõidukiirust või reguleerida infotahvli LED-osakeste nurka.
3. Meetmete kavandamine kaalumisvigade vähendamiseks
Vastavalt karistusnormi ülekoormusjaotuse nõuetele peaks sõidukiiruse 1-80 km/h korral dünaamilisel kaalumisel sõiduki ja lasti kogumass vastama täpsusastme 10 nõuetele ning sõiduki kogumassi kokkulepitud tegeliku väärtuse protsent ei ületa esimese ja järgneva ülevaatuse viga.
± 5,00% ja katseviga kasutamisel ei ületa ±10,0%.
Katendi teguritest põhjustatud kaalumise vea vähendamiseks peaks kate enne ja pärast kaalumist otseses kontrollpunktis seadmete kaalumist mõjutavas piirkonnas vastama järgmistele nõuetele:
1) pikisuunaline kalle ei tohiks olla suurem kui 2% ja katte külgkalle ei tohiks olla suurem kui 2%;
2) tsementkatendil on täitetsementbetooni ja olemasoleva tsementkatendi vahele deformatsioonivuuk, tugivarras ja täiteaine;
3) Asfaltkattel kasutatakse gradiendi üleminekut täitetsementbetooni ja olemasoleva asfaltkatte vahel. Suuna täitmise jaam
valikupunktide paigaldamist tuleks vältida järgmistel teelõikudel:
1) teelõik 200m raadiuses tasapinnalisest ristmikust;
2) teelõigul muutub sõiduradade arv;
3) viadukti (aerodünaamiline mõju) ja lähenemissilla (halb ühtsus) lõigud;
4) sillalõigud või muud sõidukitele dünaamilist mõju avaldavad rajatised;
5) Raadiosaatejaamade all või läheduses olevad lõigud ning kõrgepingeliinide all olevad raudteed.
Lisaks tuleks sõiduki sõidukäitumisest tingitud kaalumisvea vähendamiseks kaalumise osas võtta kasutusele järgmised meetmed:
1) Kui sõidurada on mitmerealine, on sõidutee eraldusjoon pidevjoon ja sõidukitel on ümberminek keelatud;
2) Kui teelõigu joondus on hea ja kergesti kiirendatav, paigaldage kaalumise tuvastamise ala ette veoki kiiruspiirangu märk;
3) Karistamisest tahtlikult kõrvalehoidva käitumise, nagu numbrimärkide blokeerimine, vales suunas sõitmine, järjekorda seadmine ja tagaluugitamine, ohjeldamiseks võib lisada ebaseaduslikke püüdmis- ja tuvastamisseadmeid.
Järeldus
Kokkuvõtteks võib öelda, et vahetu jõustamistuvastuspunktide paigutus tuleks igakülgselt kindlaks määrata pärast piirkondliku teedevõrgu, teeolude ja ümbritseva keskkonna igakülgset läbimõtlemist ning vigade vähendamise projekteerimine vastavalt paigalduskoha teeoludele, et vähendada kasutus- ja hooldusprotsessis esinevaid vigu. Liikumiskaalu ehituse maksumuse vähendamiseks on lisaks üldisele planeerimisele ja paigutuspunktide mõistlikule valikule vaja selgitada ka haldusasutust, koordineerida juhtimist mitme osakonna ja nurga alt ning püüda vähendada allikast lähtuvat ülekoormuskäitumist.

Enviko Technology Co., Ltd
E-mail: info@enviko-tech.com
https://www.envikotech.com
Chengdu kontor: nr 2004, üksus 1, hoone 2, nr 158, Tianfu 4th Street, kõrgtehnoloogia tsoon, Chengdu
Hongkongi kontor: 8F, Cheung Wang Building, San Wui tänav 251, Hongkong
Tehas: Building 36, Jinjialini tööstuspiirkond, Mianyangi linn, Sichuani provints
Postitusaeg: 09.03.2024




