
Piesoelektriline kvarts-dünaamiline kaaluandur CET8312


Lühikirjeldus:
CET8312 piesoelektrilisel kvarts-dünaamilisel kaaluanduril on lai mõõtevahemik, hea pikaajaline stabiilsus, hea korratavus, kõrge mõõtmistäpsus ja kõrge reageerimissagedus, seega sobib see eriti hästi dünaamilise kaalu tuvastamiseks. See on jäik, riba dünaamiline kaaluandur, mis põhineb piesoelektrilisel põhimõttel ja patenteeritud struktuuril. See koosneb piesoelektrilisest kvartskristalllehest, elektroodplaadist ja spetsiaalsest tala kandeseadmest. Jaotatud 1-meetriseks, 1,5-meetriseks, 1,75-meetriseks ja 2-meetriseks spetsifikatsiooniks, saab kombineerida erinevate mõõtmetega liiklusanduriteks, kohaneda teekatte dünaamiliste kaalumisvajadustega.
Toote üksikasjad
Tehnilised parameetrid
| Ristlõike mõõtmed | (48mm+58mm)*58mm | ||
| Pikkus | 1 m, 1,5 m, 1,75 m, 2 m | ||
| Rataste kaaluvahemik | 0,05 T - 40 T | ||
| Ülekoormusvõime | 150% FS | ||
| Koormustundlikkus | 2±5% pC/N | ||
| Kiirusvahemik | (0,5-200 km/h). | ||
| Kaitseaste | IP68 | Väljundtakistus | >1010Ω |
| Töötemp. | -45-80 ℃ | Väljundtemperatuuri efekt | <0,04%FS/ ℃ |
| Elektriühendus | Kõrgsageduslik staatilise müra koaksiaalkaabel | ||
| Kandepind | Kandepinda saab poleerida | ||
| Mittelineaarne | ≤±2% FS (andurite staatilise kalibreerimise täpsus igas punktis) | ||
| Järjepidevus | ≤±4% FS (anduri erinevate asendipunktide staatiline kalibreerimise täpsus) | ||
| Korduvus | ≤±2% FS (andurite staatilise kalibreerimise täpsus samas asendis) | ||
| Integreeritud täpsusviga | ≤±5% | ||
Paigaldusmeetod
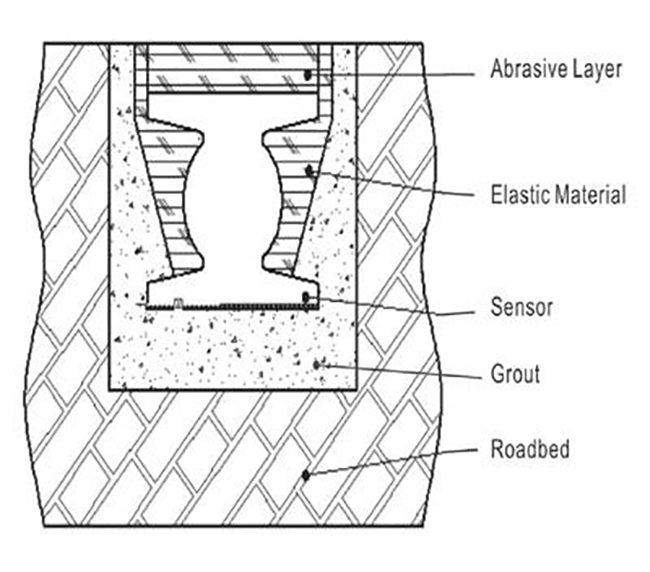
Üldine struktuur
Anduri kogu paigalduse testimisefekti tagamiseks peaks koha valik olema range. Anduri paigaldamise alusena soovitatakse valida jäik tsemendikatend ja reformida elastne kate, näiteks asfalt. Vastasel juhul võib mõõtmise täpsus või anduri kasutusiga mõjutada.
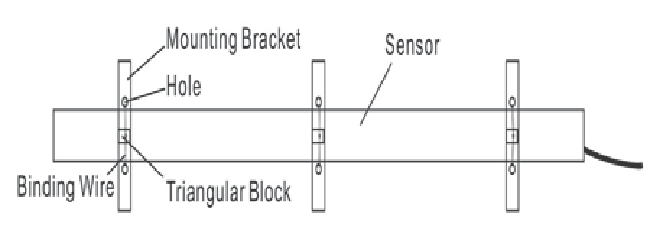

Kinnitusklamber
Pärast asukoha kindlaksmääramist tuleb anduritega kaasasolevate aukudega kinnitusklamber kinnitada anduri külge pikema traadiga teibiga ja seejärel kinnitada väikese kolmnurkse puidutükiga kinnitusrihma ja kinnitusklambri vahelisesse pilusse, et seda saaks pingutada. Kui tööjõudu on piisavalt, saab sammu (2) ja (3) läbi viia samaaegselt. Nagu ülal näidatud.
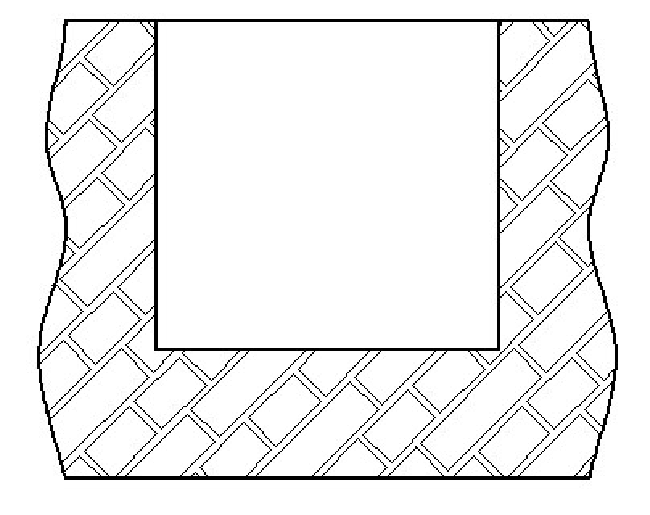
Kõnnitee soonimine
Dünaamilise kaaluanduri paigaldusasendi määramiseks kasutage joonlauda või muud tööriista. Lõikemasinat kasutatakse teel ristkülikukujuliste soonte avamiseks.
Kui sooned on ebaühtlased ja soonte servas on väikesed konarused, on soonte laius 20 mm suurem kui anduri oma, soonte sügavus on 20 mm suurem kui anduri oma ja 50 mm pikem kui anduri oma. Kaabli soon on 10 mm lai, 50 mm sügav;
Kui sooned on hoolikalt tehtud ja soonte servad on siledad, on soonte laius 5-10 mm suurem kui anduritel, soonte sügavus on 5-10 mm suurem kui anduritel ja soonte pikkus 20-50 mm rohkem kui anduritel. Kaabli soon on 10 mm lai, 50 mm sügav.
Põhi trimmitakse, soontes olev muda ja vesi puhutakse õhupumbaga puhtaks (mördi täitmiseks kuivatatakse põhjalikult) ning soonte mõlema külje pealispind kinnitatakse teibiga.
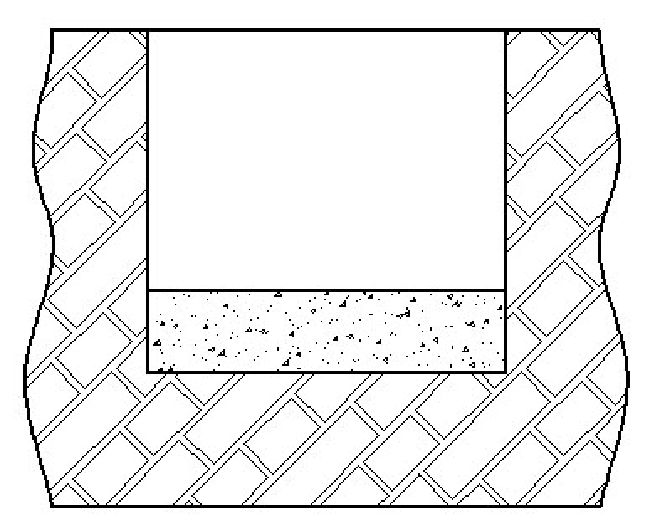
Esmakordne vuukimine
Avage paigaldusvuugis, vastavalt ettenähtud proportsioonile segavuugi ettevalmistamiseks, vuugisegu kiiresti tööriistadega segades ja seejärel valage ühtlaselt piki soone pikkuse suunda, soone esimene täidis peaks olema väiksem kui 1/3 soone sügavusest.
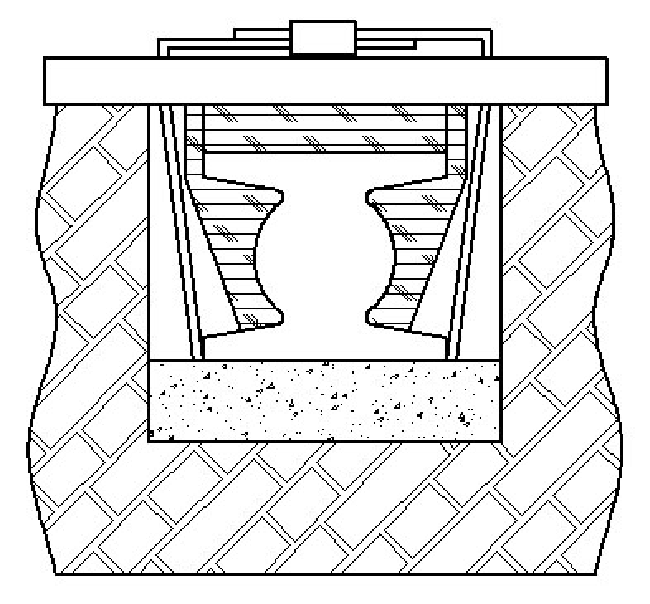
Anduri paigutus
Asetage andur koos kinnitusklambriga õrnalt süstmördiga täidetud pilusse, reguleerige kinnitusklambrit ja laske iga tugipunkt puudutada pilu ülemist pinda ning veenduge, et andur oleks pilu keskel. Kui samasse pessa on paigaldatud kaks või enam andurit, tuleb erilist tähelepanu pöörata ühendusosale.
Kahe anduri ülemine pind peab olema samal horisontaaltasapinnal ja liitekoht peab olema võimalikult väike, vastasel juhul tekib mõõtmisviga. Säästke sammudes (4) ja (5) võimalikult palju aega, vastasel juhul vuugisegu kõveneb (1-2 tundi meie liimi tavalist kõvenemisaega).
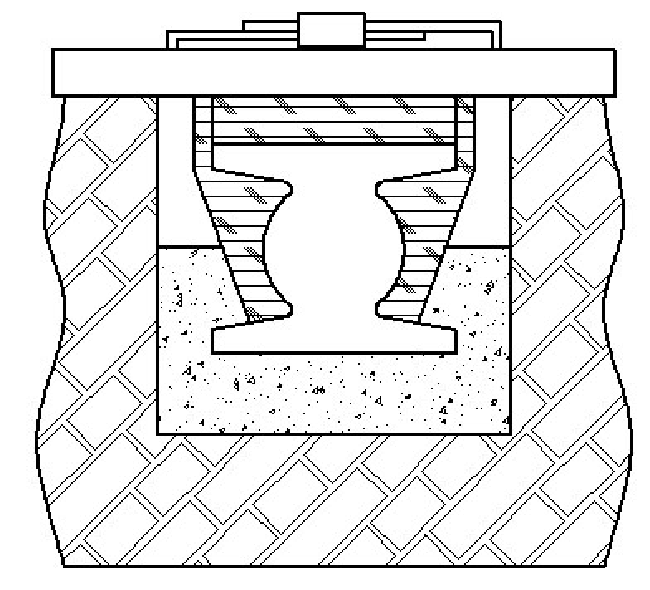
Kinnitusklambri ja teise vuugi eemaldamine
Pärast süstmördi põhilist kõvenemist jälgige anduri esialgset paigaldusefekti ja vajadusel reguleerige seda õigeaegselt. Põhimõtteliselt on kõik valmis, seejärel eemaldage kronstein ja jätkake teist vuukimist. See süstimine on piiratud anduri pinna kõrgusega.
Kolmas kord vuukimine
Kõvenemise ajal pöörake igal ajal tähelepanu vuugikoguse suurendamisele, nii et vuugisegu üldine tase pärast täitmist oleks teepinnast veidi kõrgem.
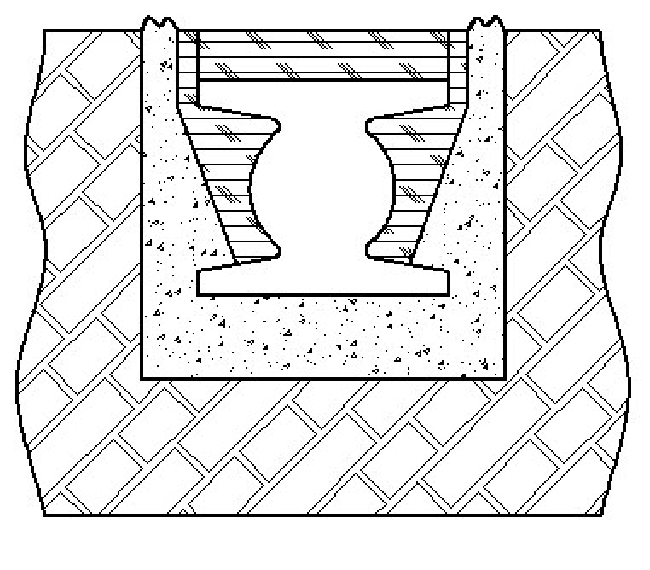
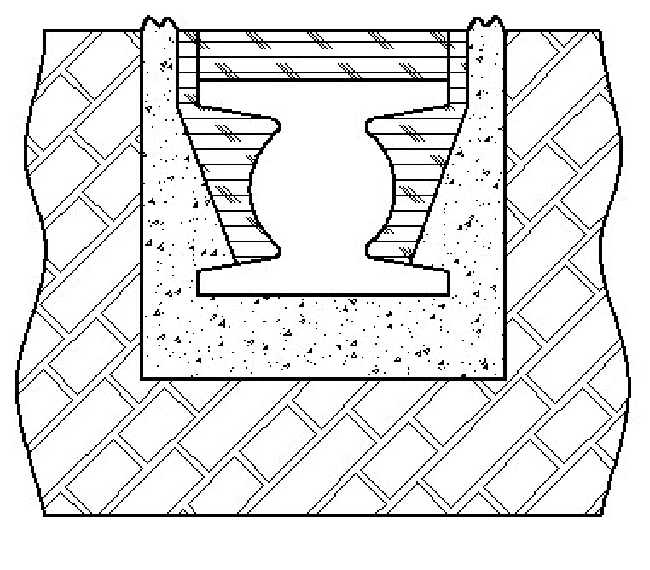
Pinna lihvimine
Kui kogu paigaldusmörd on saavutanud kõvenemise tugevuse, rebige lint maha ning lihvige soone pind ja teepind, tehke standardsõidukiga või muude sõidukitega eelkoormuskatse, et kontrollida, kas anduri paigaldamine on korras.
Kui eellaadimise test on normaalne, on installimine
lõpetatud.
Paigaldamise teatised
5.1 Anduri kasutamine väljaspool vahemikku ja töötemperatuuri on pikka aega rangelt keelatud.
5.2Anduri isolatsioonitakistuse mõõtmine kõrge takistusmõõturiga üle 1000 V on rangelt keelatud.
5.3 Mitteprofessionaalsetel töötajatel on rangelt keelatud seda kontrollida.
5.4 Mõõtevahend peab sobima alumiiniummaterjalidega, vastasel juhul on tellimisel vaja erijuhiseid.
5.5 Anduri L5/Q9 väljundots tuleb hoida mõõtmise ajal kuiv ja puhas, vastasel juhul on signaali väljund ebastabiilne.
5.6 Anduri survepinda ei tohi lüüa nüri instrumendi või tugeva jõuga.
5.7 Laenguvõimendi ribalaius peab olema suurem kui anduri ribalaius, välja arvatud juhul, kui sageduskarakteristikule pole erinõuet.
5.8 Täpse mõõtmise saavutamiseks tuleks andurite paigaldamine läbi viia rangelt kooskõlas juhendi asjakohaste nõuetega.
5.9 Kui mõõtmise lähedal on tugevad elektromagnetilised häired, tuleks võtta teatud varjestusmeetmed.
5.10Anduri ja laadimisvõimendi kaabel peab kasutama kõrgsagedusliku staatilise müraga koaksiaalkaablit.
Manused
Manuaal 1 tk
Tõendamise kvalifikatsioon 1 tk Sertifikaat 1 tk
Hangtag 1 tk
Q9 väljundkaabel 1 tk
Enviko on olnud spetsialiseerunud Weigh-in-Motion süsteemidele üle 10 aasta. Meie WIM-andurid ja muud tooted on ITS-tööstuses laialdaselt tunnustatud.









